
Description
The POLAR Traverse Dataset seeks to provide stereo pairs of camera images that mimic the traverse of a rover or other mobile platform across the lunar surface at the poles of the moon under multiple parameter settings. The lunar polar regions are characterized by extreme lighting conditions caused by the absence of an atmosphere, the reflectance properties of lunar regolith, and low solar incidence angles. This dataset is similar to and inspired by the POLAR Stereo Dataset. While the Stereo Dataset contains a wider variety of terrain types and scenes, the Traverse Dataset provides images taken sequentially along a larger test bed in order to simulate traverses across the terrain. We believe the dataset will be useful for developing software algorithms for perception, mapping, and visual odometry under the harsh lighting conditions found in lunar south polar terrain.
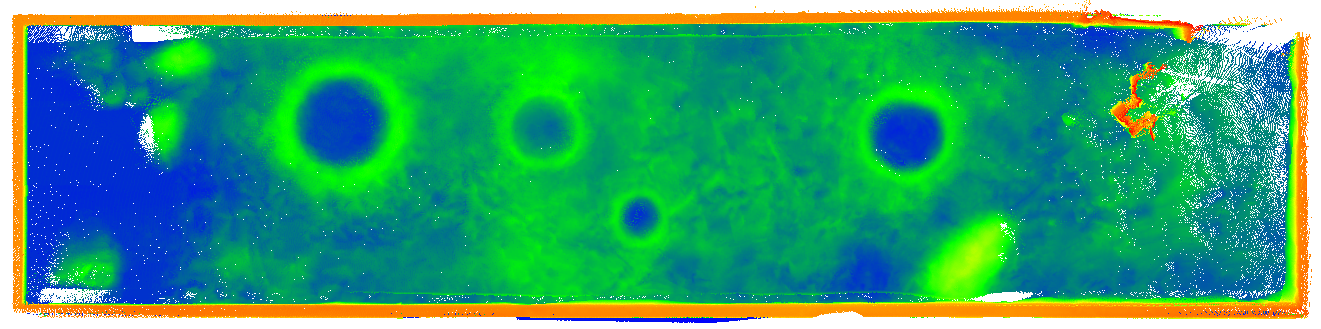
The data was collected in a laboratory setting in which a simulated lunar scene has been constructed in a test bed filled with regolith simulant. The test bed was illuminated at oblique angles using lighting placed very low to the ground to simulate the solar incidence angles found in polar regions. A stereo rig mounted on a rolling camera jib was used to suspend the cameras over the terrain at various heights; a set of camera mounts controlled the pitch angles of the cameras. Stereo pair images were collected for multiple exposure times at 1 m intervals along the length of the test bed under two lighting conditions and camera directions (the two different directions along the test bed). A FARO scanner (high-resolution LiDAR) was used to collect dense ground truth geometry of the scene at 8 mm accuracy (shown below).
The complete dataset consists of 4 views (combinations of lighting angle and camera direction), each with 6 traverses (combinations of camera height and pitch). Each traverse contains a total of 330 images (165 stereo pairs) taken along the length of the test bed at multiple exposures. More detail is provided in the README about the variable combinations used during data collection. The image data is supplemented with dense ground truth, camera positions, and geometric calibration for both cameras. Example images and downloads can be found here.
Changelog:
Nov 29, 2023 - Initial ReleaseAttribution
Citation:
Acknowledgements
We would like to thank Dr. Massimo Vespignani, Roshan Kalghatgi, and Molly O'Connor for their assistance with hardware setup, camera calibration, and terrain formation, respectively.