



















NASA Images
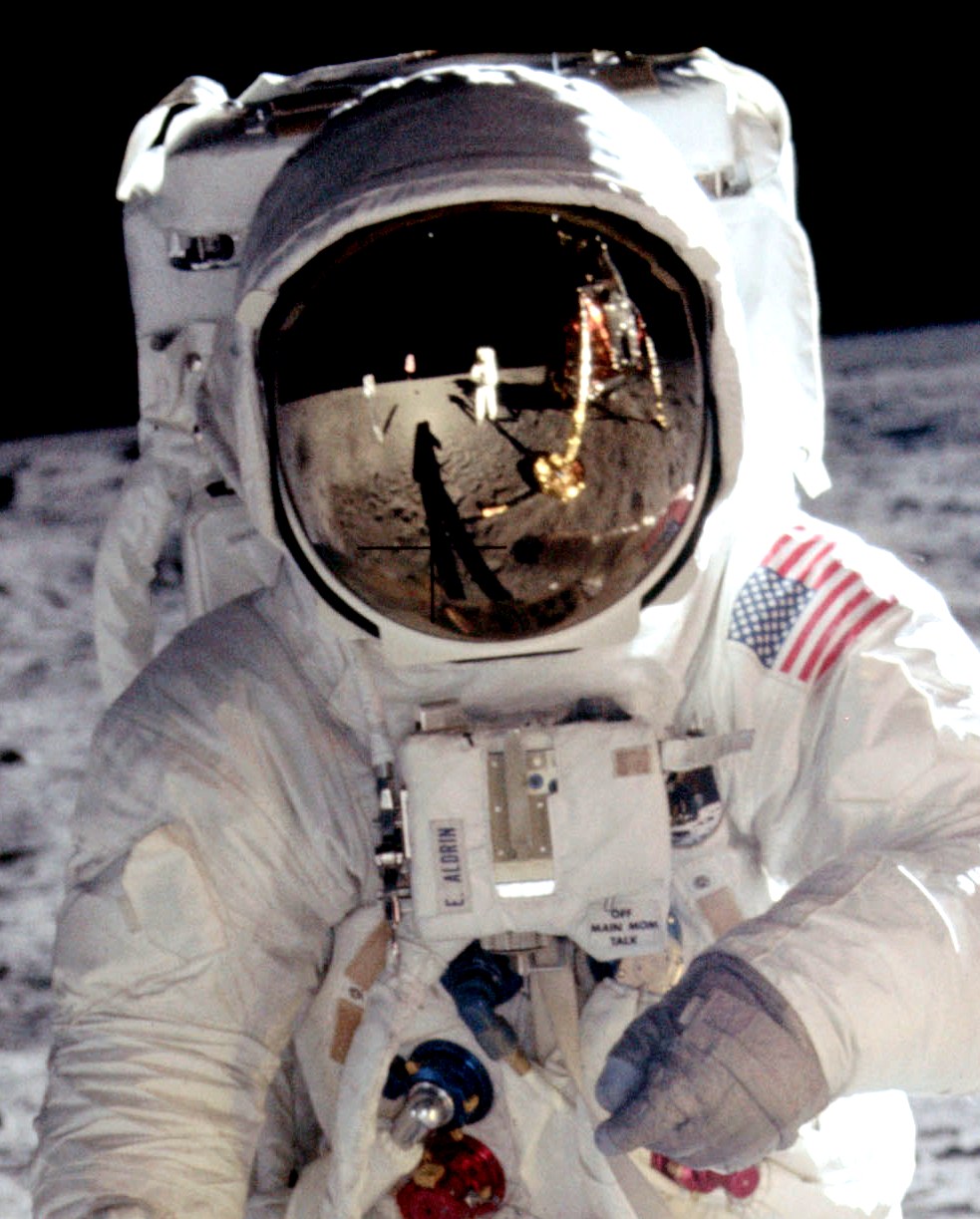
NASA has always told its story through its images, a few of which have become icons of human history.
Today
Image Of The Day
Looking Beyond the Veil
This image from NASA’s James Webb Space Telescope’s NIRCam (Near-Infrared Camera) of star-forming region NGC 604 shows how stellar winds from bright, hot young stars carve out cavities in surrounding gas and dust.

NASA HQ PHOTO: Best of 2023
The 100 best images from 2023 as captured and selected by the NASA HQ PHOTO office at NASA Headquarters in Washington.
View Images about NASA HQ PHOTO: Best of 2023
NASA Image Resources






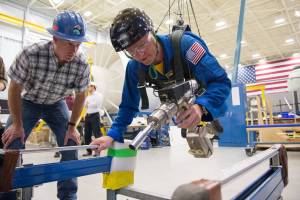
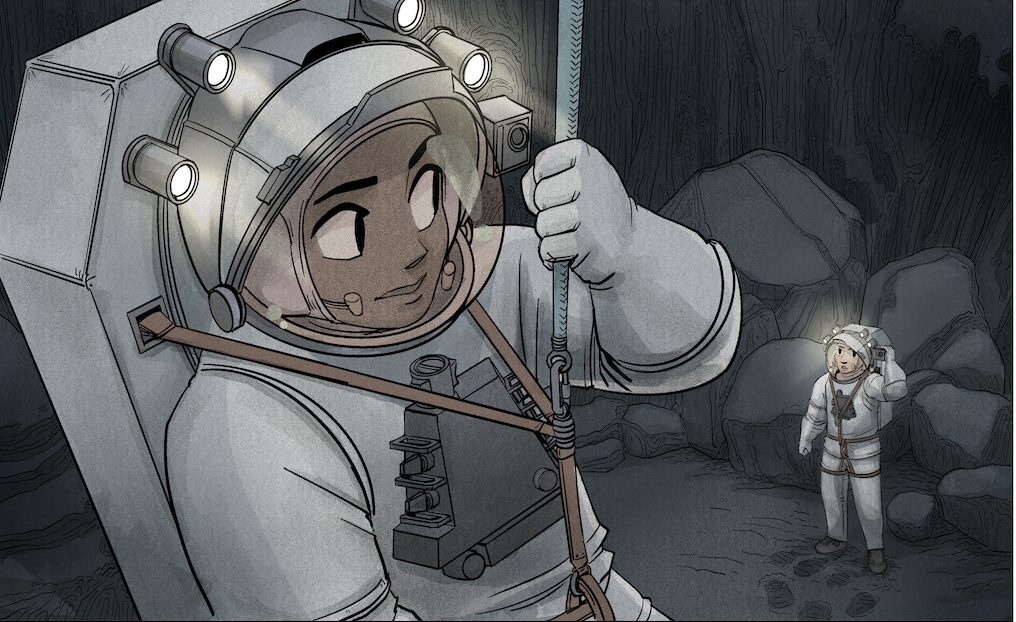
Training To Be An Astronaut
38 Images










{kind=link}