













NASA Images
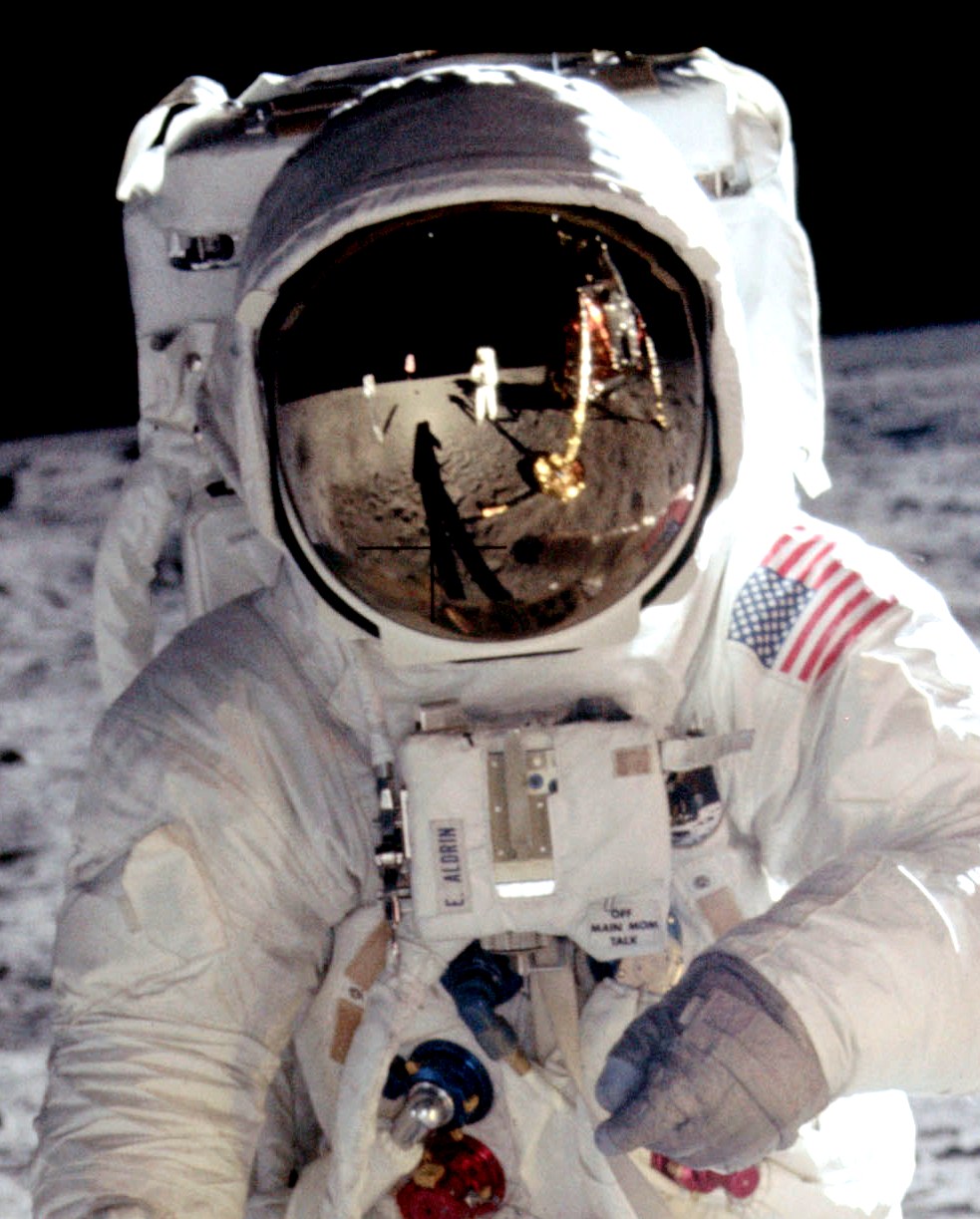
NASA has always told its story through its images, a few of which have become icons of human history.
Today
Image Of The Day
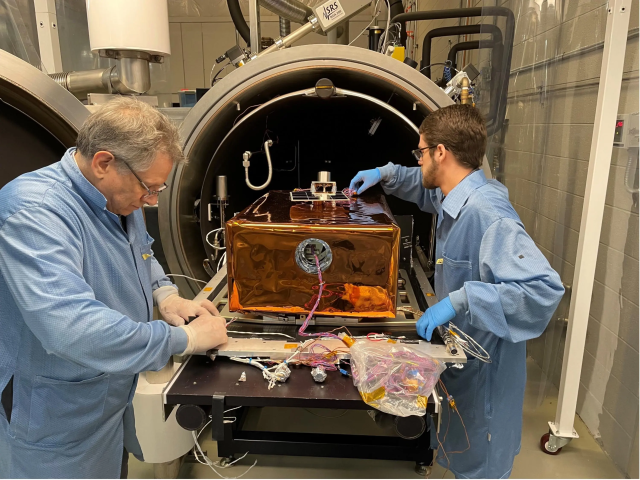
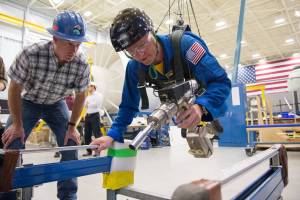
NASA’s VIPER Gets Its Head and Neck
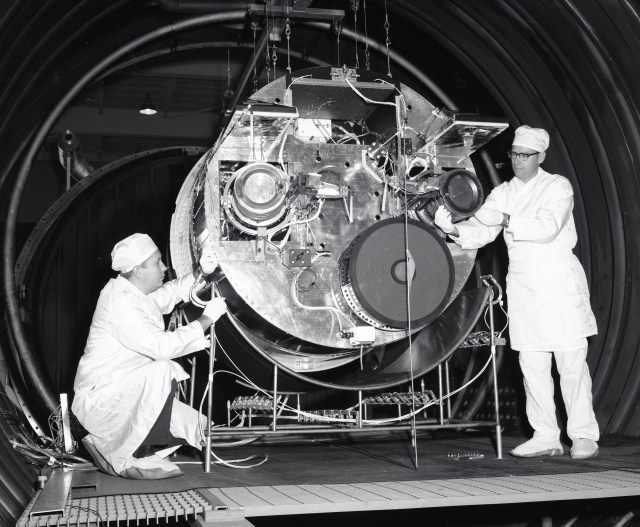
A team of engineers lifts the mast into place atop of NASA’s VIPER robotic Moon rover in a clean room at NASA’s Johnson Space Center in Houston.

NASA HQ PHOTO: Best of 2023
The 100 best images from 2023 as captured and selected by the NASA HQ PHOTO office at NASA Headquarters in Washington.
View Images about NASA HQ PHOTO: Best of 2023
NASA Image Resources






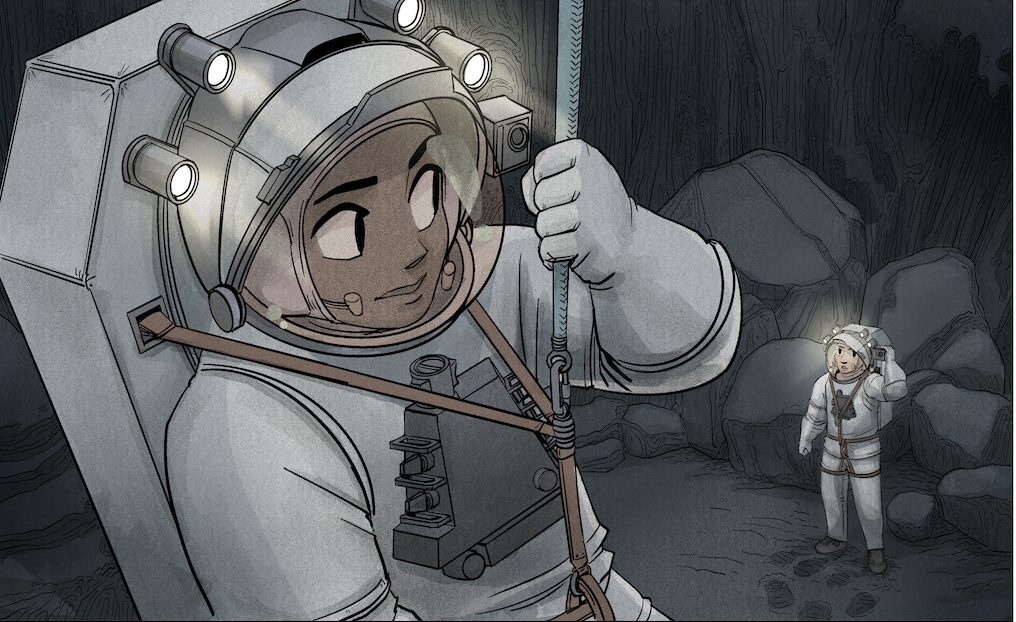
Training To Be An Astronaut
38 Images










{kind=link}