


















NASA Images
NASA has always told its story through its images, a few of which have become icons of human history.
Today
Image Of The Day
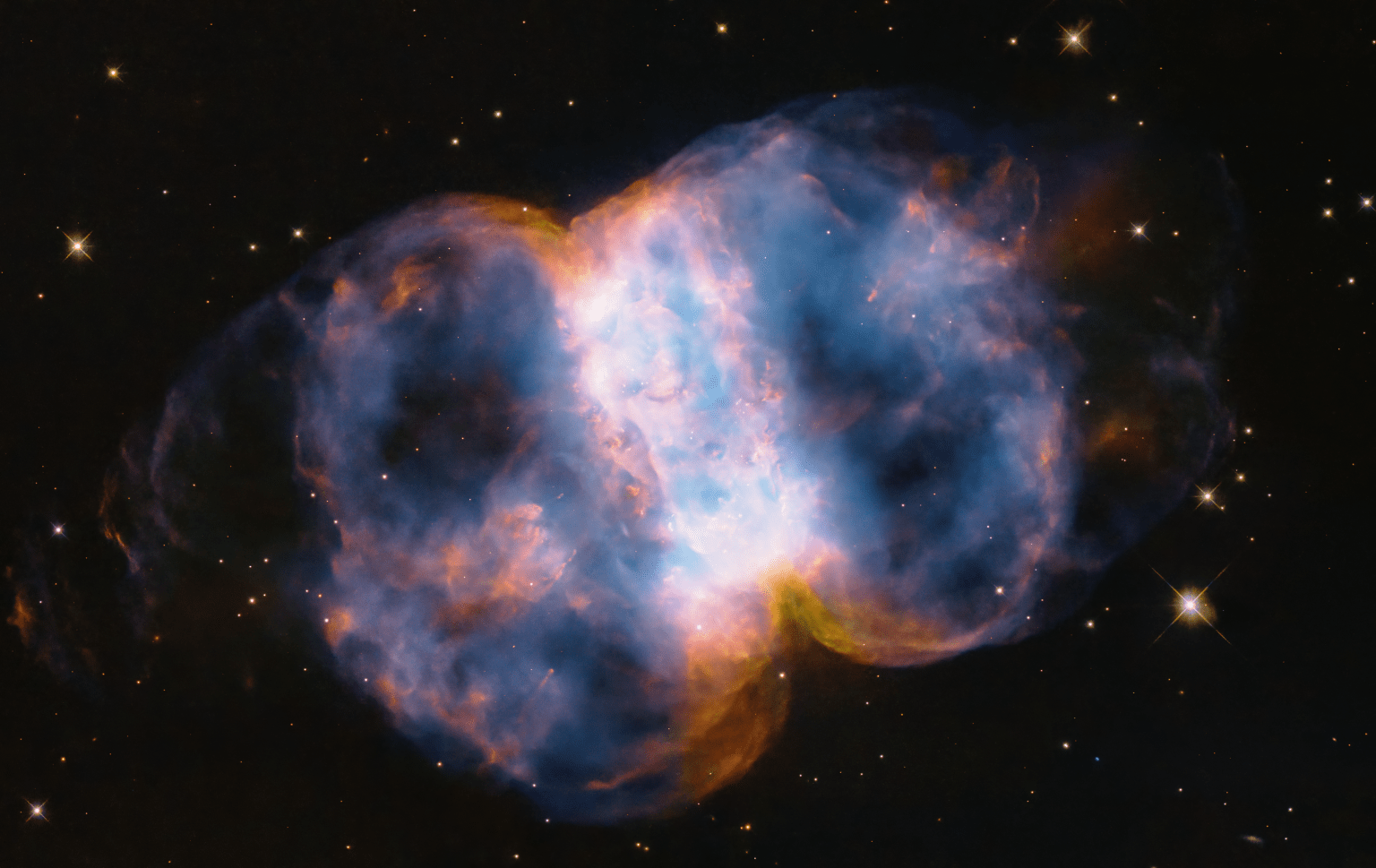
Hubble Spots the Little Dumbbell Nebula
In celebration of the 34th anniversary of the launch of NASA’s Hubble Space Telescope, astronomers took a snapshot of the Little Dumbbell Nebula, also known as Messier 76, or M76, located 3,400 light-years away in the northern circumpolar constellation Perseus. The name ‘Little Dumbbell’ comes from its shape that is a two-lobed structure of colorful, mottled, glowing gases resembling a balloon that’s been pinched around a middle waist. Like an inflating balloon, the lobes are expanding into space from a dying star seen as a white dot in the center. Blistering ultraviolet radiation from the super-hot star is causing the gases to glow. The red color is from nitrogen, and blue is from oxygen.
NASA HQ PHOTO: Best of 2023
The 100 best images from 2023 as captured and selected by the NASA HQ PHOTO office at NASA Headquarters in Washington.
View Images about NASA HQ PHOTO: Best of 2023
















{kind=link}